 |
Blender V2.61 - r43446
|
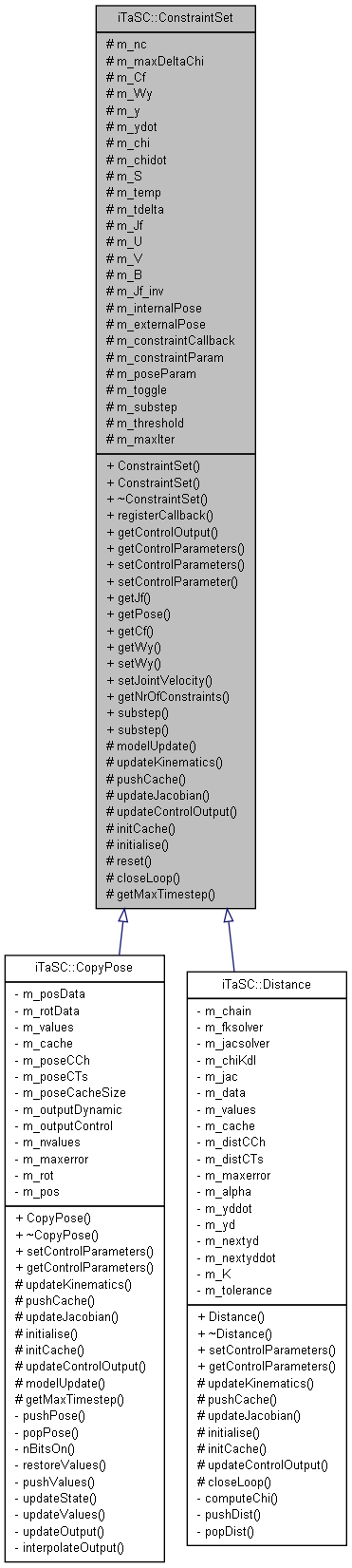
iTaSC::ConstraintSet Class Reference
#include <ConstraintSet.hpp>
Public Member Functions | |
| ConstraintSet (unsigned int nc, double accuracy, unsigned int maximum_iterations) | |
| ConstraintSet () | |
| virtual | ~ConstraintSet () |
| virtual EIGEN_MAKE_ALIGNED_OPERATOR_NEW bool | registerCallback (ConstraintCallback _function, void *_param) |
| virtual const e_vector & | getControlOutput () const |
| virtual const ConstraintValues * | getControlParameters (unsigned int *_nvalues)=0 |
| virtual bool | setControlParameters (ConstraintValues *_values, unsigned int _nvalues, double timestep=0.0)=0 |
| bool | setControlParameter (int id, ConstraintAction action, double value, double timestep=0.0) |
| virtual const e_matrix6 & | getJf () const |
| virtual const KDL::Frame & | getPose () const |
| virtual const e_matrix & | getCf () const |
| virtual const e_vector & | getWy () const |
| virtual void | setWy (const e_vector &Wy_in) |
| virtual void | setJointVelocity (const e_vector chidot_in) |
| virtual unsigned int | getNrOfConstraints () |
| void | substep (bool _substep) |
| bool | substep () |
Protected Member Functions | |
| virtual void | modelUpdate (KDL::Frame &_external_pose, const Timestamp ×tamp) |
| virtual void | updateKinematics (const Timestamp ×tamp)=0 |
| virtual void | pushCache (const Timestamp ×tamp)=0 |
| virtual void | updateJacobian ()=0 |
| virtual void | updateControlOutput (const Timestamp ×tamp)=0 |
| virtual void | initCache (Cache *_cache)=0 |
| virtual bool | initialise (KDL::Frame &init_pose) |
| virtual void | reset (unsigned int nc, double accuracy, unsigned int maximum_iterations) |
| virtual bool | closeLoop () |
| virtual double | getMaxTimestep (double ×tep) |
Protected Attributes | |
| unsigned int | m_nc |
| e_scalar | m_maxDeltaChi |
| e_matrix | m_Cf |
| e_vector | m_Wy |
| e_vector | m_y |
| e_vector | m_ydot |
| e_vector6 | m_chi |
| e_vector6 | m_chidot |
| e_vector6 | m_S |
| e_vector6 | m_temp |
| e_vector6 | m_tdelta |
| e_matrix6 | m_Jf |
| e_matrix6 | m_U |
| e_matrix6 | m_V |
| e_matrix6 | m_B |
| e_matrix6 | m_Jf_inv |
| KDL::Frame | m_internalPose |
| KDL::Frame | m_externalPose |
| ConstraintCallback | m_constraintCallback |
| void * | m_constraintParam |
| void * | m_poseParam |
| bool | m_toggle |
| bool | m_substep |
| double | m_threshold |
| unsigned int | m_maxIter |
Friends | |
| class | Scene |
Detailed Description
Definition at line 51 of file ConstraintSet.hpp.
Constructor & Destructor Documentation
| iTaSC::ConstraintSet::ConstraintSet | ( | unsigned int | nc, |
| double | accuracy, | ||
| unsigned int | maximum_iterations | ||
| ) |
| iTaSC::ConstraintSet::ConstraintSet | ( | ) |
Definition at line 34 of file ConstraintSet.cpp.
References e_scalar.
| iTaSC::ConstraintSet::~ConstraintSet | ( | ) | [virtual] |
Definition at line 65 of file ConstraintSet.cpp.
Member Function Documentation
| bool iTaSC::ConstraintSet::closeLoop | ( | ) | [protected, virtual] |
Reimplemented in iTaSC::Distance.
Definition at line 143 of file ConstraintSet.cpp.
Referenced by modelUpdate().
| virtual const e_matrix& iTaSC::ConstraintSet::getCf | ( | ) | const [inline, virtual] |
Definition at line 102 of file ConstraintSet.hpp.
References m_Cf.
| virtual const e_vector& iTaSC::ConstraintSet::getControlOutput | ( | ) | const [inline, virtual] |
Definition at line 95 of file ConstraintSet.hpp.
References m_ydot.
| virtual const ConstraintValues* iTaSC::ConstraintSet::getControlParameters | ( | unsigned int * | _nvalues | ) | [pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
Referenced by execute_scene().
| virtual const e_matrix6& iTaSC::ConstraintSet::getJf | ( | ) | const [inline, virtual] |
Definition at line 100 of file ConstraintSet.hpp.
References m_Jf.
| double iTaSC::ConstraintSet::getMaxTimestep | ( | double & | timestep | ) | [protected, virtual] |
Reimplemented in iTaSC::CopyPose.
Definition at line 82 of file ConstraintSet.cpp.
References e_scalar, m_chidot, and m_maxDeltaChi.
| virtual unsigned int iTaSC::ConstraintSet::getNrOfConstraints | ( | ) | [inline, virtual] |
Definition at line 108 of file ConstraintSet.hpp.
References m_nc.
Referenced by iTaSC::Scene::addConstraintSet().
| virtual const KDL::Frame& iTaSC::ConstraintSet::getPose | ( | ) | const [inline, virtual] |
Definition at line 101 of file ConstraintSet.hpp.
References m_internalPose.
| virtual const e_vector& iTaSC::ConstraintSet::getWy | ( | ) | const [inline, virtual] |
Definition at line 104 of file ConstraintSet.hpp.
References m_Wy.
| virtual void iTaSC::ConstraintSet::initCache | ( | Cache * | _cache | ) | [protected, pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
| bool iTaSC::ConstraintSet::initialise | ( | KDL::Frame & | init_pose | ) | [protected, virtual] |
Reimplemented in iTaSC::CopyPose, and iTaSC::Distance.
Definition at line 91 of file ConstraintSet.cpp.
| void iTaSC::ConstraintSet::modelUpdate | ( | KDL::Frame & | _external_pose, |
| const Timestamp & | timestamp | ||
| ) | [protected, virtual] |
Reimplemented in iTaSC::CopyPose.
Definition at line 69 of file ConstraintSet.cpp.
References closeLoop(), m_chi, m_chidot, m_externalPose, iTaSC::Timestamp::realTimestep, and updateJacobian().
| virtual void iTaSC::ConstraintSet::pushCache | ( | const Timestamp & | timestamp | ) | [protected, pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
| virtual EIGEN_MAKE_ALIGNED_OPERATOR_NEW bool iTaSC::ConstraintSet::registerCallback | ( | ConstraintCallback | _function, |
| void * | _param | ||
| ) | [inline, virtual] |
Definition at line 88 of file ConstraintSet.hpp.
References m_constraintCallback, and m_constraintParam.
Referenced by convert_tree().
| void iTaSC::ConstraintSet::reset | ( | unsigned int | nc, |
| double | accuracy, | ||
| unsigned int | maximum_iterations | ||
| ) | [protected, virtual] |
Definition at line 44 of file ConstraintSet.cpp.
References iTaSC::accuracy, e_identity_matrix, e_scalar_vector, e_zero_matrix, e_zero_vector, m_B, m_Cf, m_chi, m_chidot, m_Jf, m_Jf_inv, m_maxIter, m_nc, m_S, m_tdelta, m_temp, m_threshold, m_U, m_V, m_Wy, m_y, m_ydot, and iTaSC::maximum_iterations.
| bool iTaSC::ConstraintSet::setControlParameter | ( | int | id, |
| ConstraintAction | action, | ||
| double | value, | ||
| double | timestep = 0.0 |
||
| ) |
Definition at line 106 of file ConstraintSet.cpp.
References iTaSC::ACT_ALPHA, iTaSC::ACT_FEEDBACK, iTaSC::ACT_NONE, iTaSC::ACT_TOLERANCE, iTaSC::ACT_VALUE, iTaSC::ACT_VELOCITY, iTaSC::ConstraintValues::action, iTaSC::ConstraintSingleValue::action, iTaSC::ConstraintValues::alpha, assert, data, iTaSC::ConstraintValues::feedback, iTaSC::ConstraintValues::id, iTaSC::ConstraintSingleValue::id, iTaSC::ConstraintValues::number, setControlParameters(), iTaSC::ConstraintValues::tolerance, iTaSC::ConstraintValues::values, iTaSC::ConstraintSingleValue::yd, and iTaSC::ConstraintSingleValue::yddot.
Referenced by convert_tree().
| virtual bool iTaSC::ConstraintSet::setControlParameters | ( | ConstraintValues * | _values, |
| unsigned int | _nvalues, | ||
| double | timestep = 0.0 |
||
| ) | [pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
Referenced by setControlParameter().
| virtual void iTaSC::ConstraintSet::setJointVelocity | ( | const e_vector | chidot_in | ) | [inline, virtual] |
Definition at line 106 of file ConstraintSet.hpp.
References m_chidot.
| virtual void iTaSC::ConstraintSet::setWy | ( | const e_vector & | Wy_in | ) | [inline, virtual] |
Definition at line 105 of file ConstraintSet.hpp.
References m_Wy.
| void iTaSC::ConstraintSet::substep | ( | bool | _substep | ) | [inline] |
Definition at line 109 of file ConstraintSet.hpp.
References m_substep.
Referenced by convert_tree().
| bool iTaSC::ConstraintSet::substep | ( | ) | [inline] |
Definition at line 110 of file ConstraintSet.hpp.
References m_substep.
| virtual void iTaSC::ConstraintSet::updateControlOutput | ( | const Timestamp & | timestamp | ) | [protected, pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
| virtual void iTaSC::ConstraintSet::updateJacobian | ( | ) | [protected, pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
Referenced by modelUpdate().
| virtual void iTaSC::ConstraintSet::updateKinematics | ( | const Timestamp & | timestamp | ) | [protected, pure virtual] |
Implemented in iTaSC::CopyPose, and iTaSC::Distance.
Friends And Related Function Documentation
friend class Scene [friend] |
Definition at line 68 of file ConstraintSet.hpp.
Member Data Documentation
e_matrix6 iTaSC::ConstraintSet::m_B [protected] |
Definition at line 58 of file ConstraintSet.hpp.
Referenced by reset().
e_matrix iTaSC::ConstraintSet::m_Cf [protected] |
Definition at line 55 of file ConstraintSet.hpp.
e_vector6 iTaSC::ConstraintSet::m_chi [protected] |
Definition at line 57 of file ConstraintSet.hpp.
Referenced by iTaSC::Distance::getControlParameters(), modelUpdate(), reset(), iTaSC::Distance::updateControlOutput(), and iTaSC::Distance::updateJacobian().
e_vector6 iTaSC::ConstraintSet::m_chidot [protected] |
Definition at line 57 of file ConstraintSet.hpp.
Referenced by getMaxTimestep(), modelUpdate(), reset(), and setJointVelocity().
Definition at line 60 of file ConstraintSet.hpp.
Referenced by registerCallback(), and iTaSC::Distance::updateControlOutput().
void* iTaSC::ConstraintSet::m_constraintParam [protected] |
Definition at line 61 of file ConstraintSet.hpp.
Referenced by registerCallback(), and iTaSC::Distance::updateControlOutput().
KDL::Frame iTaSC::ConstraintSet::m_externalPose [protected] |
Definition at line 59 of file ConstraintSet.hpp.
Referenced by iTaSC::Distance::closeLoop(), iTaSC::Distance::initialise(), and modelUpdate().
KDL::Frame iTaSC::ConstraintSet::m_internalPose [protected] |
Definition at line 59 of file ConstraintSet.hpp.
Referenced by iTaSC::Distance::closeLoop(), getPose(), and iTaSC::Distance::updateJacobian().
e_matrix6 iTaSC::ConstraintSet::m_Jf [protected] |
Definition at line 58 of file ConstraintSet.hpp.
Referenced by getJf(), reset(), and iTaSC::Distance::updateJacobian().
e_matrix6 iTaSC::ConstraintSet::m_Jf_inv [protected] |
Definition at line 58 of file ConstraintSet.hpp.
Referenced by reset().
e_scalar iTaSC::ConstraintSet::m_maxDeltaChi [protected] |
Definition at line 54 of file ConstraintSet.hpp.
Referenced by getMaxTimestep(), and iTaSC::CopyPose::getMaxTimestep().
unsigned int iTaSC::ConstraintSet::m_maxIter [protected] |
Definition at line 66 of file ConstraintSet.hpp.
Referenced by reset().
unsigned int iTaSC::ConstraintSet::m_nc [protected] |
Definition at line 53 of file ConstraintSet.hpp.
Referenced by getNrOfConstraints(), and reset().
void* iTaSC::ConstraintSet::m_poseParam [protected] |
Definition at line 62 of file ConstraintSet.hpp.
e_vector6 iTaSC::ConstraintSet::m_S [protected] |
Definition at line 57 of file ConstraintSet.hpp.
Referenced by reset().
bool iTaSC::ConstraintSet::m_substep [protected] |
Definition at line 64 of file ConstraintSet.hpp.
Referenced by substep(), and iTaSC::Distance::updateControlOutput().
e_vector6 iTaSC::ConstraintSet::m_tdelta [protected] |
Definition at line 57 of file ConstraintSet.hpp.
Referenced by reset().
e_vector6 iTaSC::ConstraintSet::m_temp [protected] |
Definition at line 57 of file ConstraintSet.hpp.
Referenced by reset().
double iTaSC::ConstraintSet::m_threshold [protected] |
Definition at line 65 of file ConstraintSet.hpp.
Referenced by iTaSC::Distance::closeLoop(), and reset().
bool iTaSC::ConstraintSet::m_toggle [protected] |
Definition at line 63 of file ConstraintSet.hpp.
e_matrix6 iTaSC::ConstraintSet::m_U [protected] |
Definition at line 58 of file ConstraintSet.hpp.
Referenced by reset().
e_matrix6 iTaSC::ConstraintSet::m_V [protected] |
Definition at line 58 of file ConstraintSet.hpp.
Referenced by reset().
e_vector iTaSC::ConstraintSet::m_Wy [protected] |
Definition at line 56 of file ConstraintSet.hpp.
Referenced by getWy(), reset(), iTaSC::Distance::setControlParameters(), and setWy().
e_vector iTaSC::ConstraintSet::m_y [protected] |
Definition at line 56 of file ConstraintSet.hpp.
Referenced by reset().
e_vector iTaSC::ConstraintSet::m_ydot [protected] |
Definition at line 56 of file ConstraintSet.hpp.
Referenced by getControlOutput(), iTaSC::Distance::getControlParameters(), reset(), and iTaSC::Distance::updateControlOutput().
The documentation for this class was generated from the following files:
Generated on Tue Jan 17 2012 14:43:20 for Blender by doxygen 1.7.3