 |
Blender V2.61 - r43446
|
btSoftColliders::ClusterBase Struct Reference
#include <btSoftBodyInternals.h>
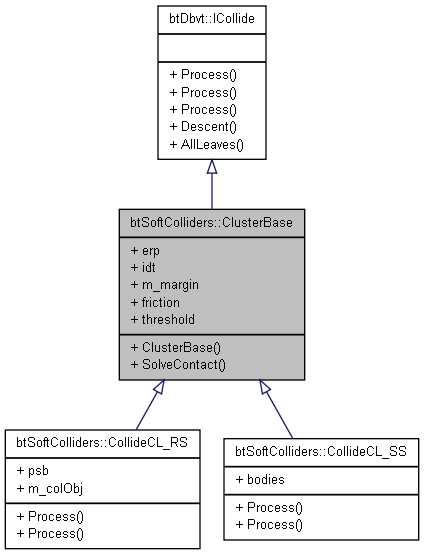
Public Member Functions | |
| ClusterBase () | |
| bool | SolveContact (const btGjkEpaSolver2::sResults &res, btSoftBody::Body ba, btSoftBody::Body bb, btSoftBody::CJoint &joint) |
Public Attributes | |
| btScalar | erp |
| btScalar | idt |
| btScalar | m_margin |
| btScalar | friction |
| btScalar | threshold |
Detailed Description
Definition at line 653 of file btSoftBodyInternals.h.
Constructor & Destructor Documentation
| btSoftColliders::ClusterBase::ClusterBase | ( | ) | [inline] |
Definition at line 660 of file btSoftBodyInternals.h.
Member Function Documentation
| bool btSoftColliders::ClusterBase::SolveContact | ( | const btGjkEpaSolver2::sResults & | res, |
| btSoftBody::Body | ba, | ||
| btSoftBody::Body | bb, | ||
| btSoftBody::CJoint & | joint | ||
| ) | [inline] |
Definition at line 668 of file btSoftBodyInternals.h.
References btDot(), btGjkEpaSolver2::sResults::distance, btTransform::getBasis(), btTransform::getOrigin(), ImpulseMatrix(), btSoftBody::Body::invMass(), btSoftBody::Body::invWorldInertia(), btSoftBody::Joint::m_bodies, btSoftBody::Joint::m_cfm, btSoftBody::Joint::m_delete, btSoftBody::Joint::m_drift, btSoftBody::Joint::m_erp, btSoftBody::CJoint::m_friction, btSoftBody::CJoint::m_life, btSoftBody::Joint::m_massmatrix, btSoftBody::CJoint::m_maxlife, btSoftBody::CJoint::m_normal, btSoftBody::Joint::m_refs, btSoftBody::CJoint::m_rpos, btSoftBody::Joint::m_split, norm(), btGjkEpaSolver2::sResults::normal, btSoftBody::Body::velocity(), btGjkEpaSolver2::sResults::witnesses, and btSoftBody::Body::xform().
Member Data Documentation
Definition at line 655 of file btSoftBodyInternals.h.
Definition at line 658 of file btSoftBodyInternals.h.
Definition at line 656 of file btSoftBodyInternals.h.
Definition at line 657 of file btSoftBodyInternals.h.
Definition at line 659 of file btSoftBodyInternals.h.
The documentation for this struct was generated from the following file:
Generated on Tue Jan 17 2012 14:40:56 for Blender by doxygen 1.7.3