 |
Blender V2.61 - r43446
|
|
Blender V2.61 - r43446
|
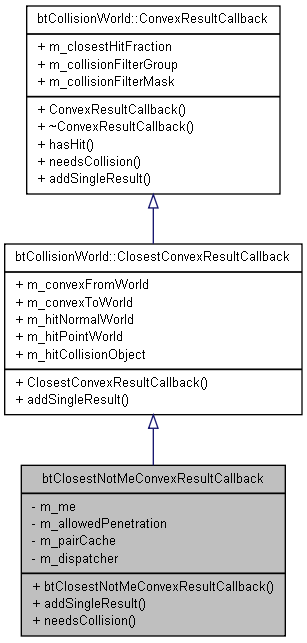
Public Member Functions | |
| btClosestNotMeConvexResultCallback (btCollisionObject *me, const btVector3 &fromA, const btVector3 &toA, btOverlappingPairCache *pairCache, btDispatcher *dispatcher) | |
| virtual btScalar | addSingleResult (btCollisionWorld::LocalConvexResult &convexResult, bool normalInWorldSpace) |
| virtual bool | needsCollision (btBroadphaseProxy *proxy0) const |
Definition at line 746 of file btDiscreteDynamicsWorld.cpp.
| btClosestNotMeConvexResultCallback::btClosestNotMeConvexResultCallback | ( | btCollisionObject * | me, |
| const btVector3 & | fromA, | ||
| const btVector3 & | toA, | ||
| btOverlappingPairCache * | pairCache, | ||
| btDispatcher * | dispatcher | ||
| ) | [inline] |
Definition at line 755 of file btDiscreteDynamicsWorld.cpp.
| virtual btScalar btClosestNotMeConvexResultCallback::addSingleResult | ( | btCollisionWorld::LocalConvexResult & | convexResult, |
| bool | normalInWorldSpace | ||
| ) | [inline, virtual] |
Reimplemented from btCollisionWorld::ClosestConvexResultCallback.
Definition at line 764 of file btDiscreteDynamicsWorld.cpp.
References btCollisionWorld::ClosestConvexResultCallback::m_convexFromWorld, btCollisionWorld::ClosestConvexResultCallback::m_convexToWorld, btCollisionWorld::LocalConvexResult::m_hitCollisionObject, and btCollisionWorld::LocalConvexResult::m_hitNormalLocal.
| virtual bool btClosestNotMeConvexResultCallback::needsCollision | ( | btBroadphaseProxy * | proxy0 | ) | const [inline, virtual] |
don't do CCD when the collision filters are not matching
don't do CCD when there are already contact points (touching contact/penetration)
Reimplemented from btCollisionWorld::ConvexResultCallback.
Definition at line 785 of file btDiscreteDynamicsWorld.cpp.
References btOverlappingPairCache::findPair(), if(), btDispatcher::needsResponse(), btAlignedObjectArray< T >::resize(), and btAlignedObjectArray< T >::size().