 |
Blender V2.61 - r43446
|
|
Blender V2.61 - r43446
|
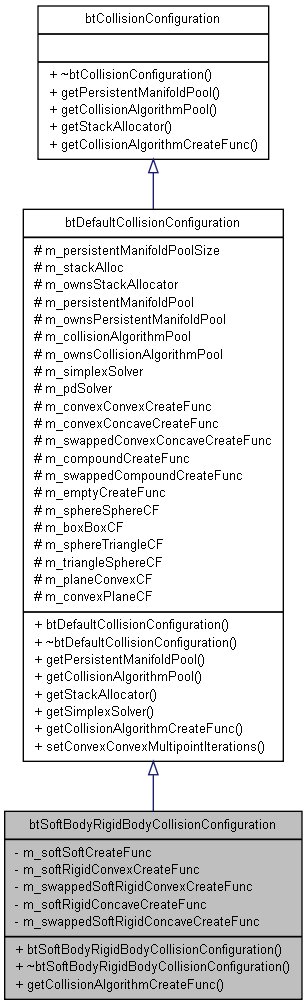
btSoftBodyRigidBodyCollisionConfiguration add softbody interaction on top of btDefaultCollisionConfiguration More...
#include <btSoftBodyRigidBodyCollisionConfiguration.h>
Public Member Functions | |
| btSoftBodyRigidBodyCollisionConfiguration (const btDefaultCollisionConstructionInfo &constructionInfo=btDefaultCollisionConstructionInfo()) | |
| virtual | ~btSoftBodyRigidBodyCollisionConfiguration () |
| virtual btCollisionAlgorithmCreateFunc * | getCollisionAlgorithmCreateFunc (int proxyType0, int proxyType1) |
| creation of soft-soft and soft-rigid, and otherwise fallback to base class implementation | |
btSoftBodyRigidBodyCollisionConfiguration add softbody interaction on top of btDefaultCollisionConfiguration
Definition at line 26 of file btSoftBodyRigidBodyCollisionConfiguration.h.
| btSoftBodyRigidBodyCollisionConfiguration::btSoftBodyRigidBodyCollisionConfiguration | ( | const btDefaultCollisionConstructionInfo & | constructionInfo = btDefaultCollisionConstructionInfo() | ) |
calculate maximum element size, big enough to fit any collision algorithm in the memory pool
Definition at line 25 of file btSoftBodyRigidBodyCollisionConfiguration.cpp.
References btAlignedAlloc, btAlignedFree, btMax(), btPoolAllocator::getElementSize(), btDefaultCollisionConfiguration::m_collisionAlgorithmPool, btDefaultCollisionConstructionInfo::m_defaultMaxCollisionAlgorithmPoolSize, btDefaultCollisionConfiguration::m_ownsCollisionAlgorithmPool, btCollisionAlgorithmCreateFunc::m_swapped, and btPoolAllocator::~btPoolAllocator().
| btSoftBodyRigidBodyCollisionConfiguration::~btSoftBodyRigidBodyCollisionConfiguration | ( | ) | [virtual] |
Definition at line 75 of file btSoftBodyRigidBodyCollisionConfiguration.cpp.
References btAlignedFree, and btCollisionAlgorithmCreateFunc::~btCollisionAlgorithmCreateFunc().
| btCollisionAlgorithmCreateFunc * btSoftBodyRigidBodyCollisionConfiguration::getCollisionAlgorithmCreateFunc | ( | int | proxyType0, |
| int | proxyType1 | ||
| ) | [virtual] |
creation of soft-soft and soft-rigid, and otherwise fallback to base class implementation
try to handle the softbody interactions first
softbody versus convex
convex versus soft body
softbody versus convex
convex versus soft body
fallback to the regular rigid collision shape
Reimplemented from btDefaultCollisionConfiguration.
Definition at line 96 of file btSoftBodyRigidBodyCollisionConfiguration.cpp.
References SOFTBODY_SHAPE_PROXYTYPE.