 |
Blender V2.61 - r43446
|
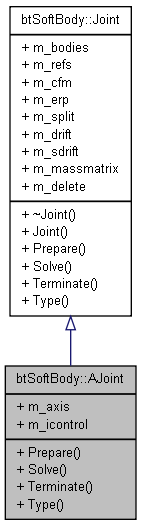
btSoftBody::AJoint Struct Reference
#include <btSoftBody.h>
Classes | |
| struct | IControl |
| struct | Specs |
Public Member Functions | |
| void | Prepare (btScalar dt, int iterations) |
| void | Solve (btScalar dt, btScalar sor) |
| void | Terminate (btScalar dt) |
| eType::_ | Type () const |
Public Attributes | |
| btVector3 | m_axis [2] |
| IControl * | m_icontrol |
Detailed Description
Definition at line 521 of file btSoftBody.h.
Member Function Documentation
| void btSoftBody::AJoint::Prepare | ( | btScalar | dt, |
| int | iterations | ||
| ) | [virtual] |
Reimplemented from btSoftBody::Joint.
Definition at line 2502 of file btSoftBody.cpp.
References AngularImpulseMatrix(), btAcos(), btCross(), btDot(), btMin(), NormalizeAny(), btSoftBody::Joint::Prepare(), and SIMD_PI.
Implements btSoftBody::Joint.
Definition at line 2522 of file btSoftBody.cpp.
References btDot(), btSoftBody::Impulse::m_asVelocity, and btSoftBody::Impulse::m_velocity.
| void btSoftBody::AJoint::Terminate | ( | btScalar | dt | ) | [virtual] |
Implements btSoftBody::Joint.
Definition at line 2537 of file btSoftBody.cpp.
| eType::_ btSoftBody::AJoint::Type | ( | ) | const [inline, virtual] |
Implements btSoftBody::Joint.
Definition at line 540 of file btSoftBody.h.
References btSoftBody::Joint::eType::Angular.
Member Data Documentation
| btVector3 btSoftBody::AJoint::m_axis[2] |
Definition at line 535 of file btSoftBody.h.
Definition at line 536 of file btSoftBody.h.
Referenced by btSoftBody::appendAngularJoint().
The documentation for this struct was generated from the following files:
Generated on Tue Jan 17 2012 14:40:54 for Blender by doxygen 1.7.3